Motor DC Servo Presisi 46S/185-8A

Fitur dasar motor servo DC: (model lain, kinerja dapat disesuaikan)
| 1. Nilai tegangan: | DC 7.4V | 5. Kecepatan terukur: | ≥ 2600 rpm |
| 2. Rentang tegangan operasi: | DC 7.4V-13V | 6.Memblokir arus: | ≤2.5A |
| 3. Nilai daya: | 25W | 7. Muat arus: | ≥1A |
| 4. Arah rotasi: | Poros keluaran CW ada di atas | 8. Jarak bebas poros: | ≤1.0mm |
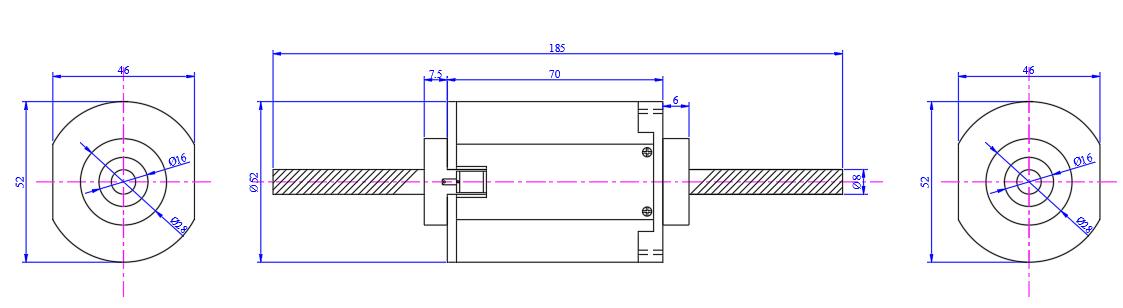
Diagram penampilan produk
Waktu kedaluwarsa
Sejak tanggal produksi, masa penggunaan produk yang aman adalah 10 tahun, dan waktu kerja terus menerus adalah ≥ 2000 jam.
Fitur produk
1. Desain kompak dan hemat ruang;
2. Struktur bantalan bola;
3. Umur panjang sikat;
4. Akses eksternal ke sikat memungkinkan penggantian mudah untuk memperpanjang umur motor;
5. Torsi awal yang tinggi;
6. Pengereman dinamis untuk berhenti lebih cepat;
7. Rotasi yang dapat dibalik;
8. Koneksi dua kabel sederhana;
9. Isolasi kelas F, komutator pengelasan suhu tinggi.
10. Kinerja tinggi, kinerja biaya tinggi dan gangguan rendah.
Aplikasi
Ini banyak digunakan di bidang rumah pintar, perangkat medis presisi, penggerak mobil, produk elektronik konsumen, peralatan pijat dan perawatan kesehatan, alat perawatan pribadi, transmisi robot cerdas, otomasi industri, peralatan mekanis otomatis, produk digital, dll.
Ilustrasi kinerja



Sistem servo: Ini adalah sistem kendali otomatis yang memungkinkan besaran keluaran yang dikontrol seperti posisi, orientasi, dan keadaan suatu objek mengikuti perubahan apa pun pada target masukan (atau nilai tertentu). Tugas utama servo adalah memperkuat, mengubah, dan mengatur daya sesuai dengan persyaratan perintah kontrol, sehingga torsi, kecepatan, dan keluaran posisi oleh perangkat penggerak dapat dikontrol dengan sangat fleksibel dan nyaman.
Karena kinerja “servo” nya, maka dinamakan motor servo. Fungsinya untuk mengubah sinyal kendali tegangan masukan menjadi keluaran perpindahan sudut dan kecepatan sudut pada poros untuk menggerakkan benda kendali.
Prinsip Motor Servo DC
Prinsip kerja motor servo DC pada dasarnya sama dengan motor DC biasa. Torsi elektromagnetik dihasilkan oleh aksi aliran udara jangkar dan fluks magnet celah udara untuk membuat motor servo berputar. Biasanya metode kendali jangkar digunakan untuk mengubah kecepatan dengan mengubah tegangan sambil menjaga tegangan eksitasi tetap konstan. Semakin kecil tegangannya, semakin rendah kecepatannya, dan ketika tegangannya nol, ia berhenti berputar. Karena ketika tegangannya nol maka arusnya juga nol, sehingga motor tidak akan menghasilkan torsi elektromagnetik, juga tidak akan muncul fenomena putaran sendiri.







